

身長2釐米、體重0.3克,身段柔軟小巧靈活,能指哪去哪兒、上下陡坡、負(fù)載重物。日前,武漢大學(xué)動力與機(jī)械學(xué)院材料學(xué)博士生汪鑫在導(dǎo)師的幫助下研製出一款軟體機(jī)器人,預(yù)期可在廢墟狹縫、生物體內(nèi)完成多種複雜作業(yè)。
“製作這種軟體機(jī)器人,最快一個小時就可以完工。”汪鑫介紹,這個名為Geca-Robot的小傢夥有著自己的“腳”和“肌肉”。它以倣壁虎剛毛的微米三棱柱陣列作為“腳”,以交替排列的透明PDMS條帶和石墨烯/PDMS複合材料(GP)條帶組成“肌肉”。步態(tài)則是借鑒了壁虎腳的取向黏附能力和尺蠖前後足交替運(yùn)動模式。在光照(紫外到紅外光全波段均可)時,前足向前移動,關(guān)閉光照時,後足向前移動;交替的開關(guān)光照則驅(qū)動它不斷向前運(yùn)動。
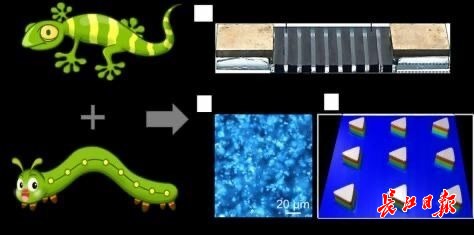
圖為軟體機(jī)器人Geca-Robot。汪鑫供圖
近日,汪鑫以第一作者身份,在材料領(lǐng)域頂尖期刊Materials Today(《今日材料》)上介紹了這種具備定向全地形運(yùn)動能力的倣生有足軟體機(jī)器人。
論文通訊作者、汪鑫的導(dǎo)師、武漢大學(xué)動力與機(jī)械學(xué)院教授薛龍建告訴長江網(wǎng)記者,該項(xiàng)研究靈感來源於兩種動物,即壁虎和尺蠖。壁虎腳掌上的獨(dú)特剛毛結(jié)構(gòu)可以使其在各種地形上進(jìn)行穩(wěn)定快速的運(yùn)動,這正好可以解決目前小尺寸軟體機(jī)器人對運(yùn)動表面適應(yīng)性較差的問題。因此,他們嘗試向機(jī)器人上引入倣壁虎腳趾剛毛的足部,讓機(jī)器人具有良好表面適應(yīng)性。
據(jù)悉,軟體機(jī)器人相較于傳統(tǒng)剛性機(jī)器人,往往具有更大的自由度和變形能力,在生産生活、醫(yī)療救援等領(lǐng)域具有巨大的應(yīng)用潛力,受到科研工作者的廣泛關(guān)注。然而,小尺寸軟體機(jī)器人的足部設(shè)計(jì)卻很少被注意到,許多機(jī)器人甚至缺乏足部設(shè)計(jì)。由於沒有良好的足部設(shè)計(jì),軟體機(jī)器人往往需要粗糙表面或具有特殊結(jié)構(gòu)的基底表面來提供前進(jìn)運(yùn)動的反作用力,運(yùn)動過程很難精確控制。而且,在光滑、傾斜或是有水的表面等,機(jī)器人的運(yùn)動能力也可能受到限制。
“因?yàn)閯幽苁枪猓涹w機(jī)器人成本很低。”薛龍建教授表示,Geca-Robot的倣生足部結(jié)構(gòu)相當(dāng)於給它穿上了最好的“防滑跑鞋”,不管是在粗糙或是光滑平面上,均能獲得足夠的抓地力而不會打滑。未來該機(jī)器人的尺寸還可以更小,達(dá)到毫米級,甚至能遊走到人體血管,向生物醫(yī)療方向發(fā)展。